汽车环境中的多径虚假目标抑制
发布时间:2024-10-09 10:05分类: 无 浏览:114评论:0
来源 | 同济智能汽车研究所(安全与性能研究室 )
编者按:随着毫米波雷达大规模MIMO 通道阵列与波形体制技术的发展,4D毫米波雷达突破了上一代毫米波雷达水平分辨率低、俯仰高度缺失以及波形体制和发射功率等问题,使得新一代4D毫米波雷达成为自动驾驶和无人驾驶环境感知领域新的研究热点。然而由于在复杂动态交通场景中电磁波的传播存在多径效应,使得MIMO体制的毫米波雷达进行目标探测与定位时生成的点云中会包含虚假目标点,从而影响毫米波雷达目标检测的稳定性。本文提出了一种新的多径虚假目标抑制方法,利用了被跟踪目标与其镜像虚假目标轨迹之间的相关性,考虑了三个准则来评估候选航迹对之间的相关性,以进行虚假目标轨迹分类,在两种汽车测试场景中评估了所提出的方法对虚假目标进行分类的能力。
摘要:本文解决了汽车雷达在多径干扰虚假目标情况下的探测问题概率和虚警性能下降问题。文章提出了一种新的多径干扰抑制方法,该方法评估了目标与假设鬼影轨迹之间的相关性,通过模拟和使用收集的雷达测量数据,在平坦反射表面附近的移动目标车辆的实际场景中,评估了所提出方法的性能。
关键词:自动驾驶,毫米波雷达,多径干扰,虚假目标
汽车雷达是现代汽车中用于主动安全和自动驾驶的主要传感器之一。在恶劣的天气和低照明条件下,雷达的性能优于其他传感器模式,如激光雷达和摄像机[1]。此外,它们还能提供更远的探测范围和直接的多普勒测量。
雷达通常通过向目标发射信号并接收其返回的回波来感知环境。对于自由空间中的单一目标,信号传播,击中目标并以直接路径向雷达反射回来。当雷达附近存在其他反射物体时,信号可能会遇到它们并以间接路径向雷达反射。图1显示了引起多个雷达回波的可能传播路径,表现为多径干扰现象[2]-[4]。
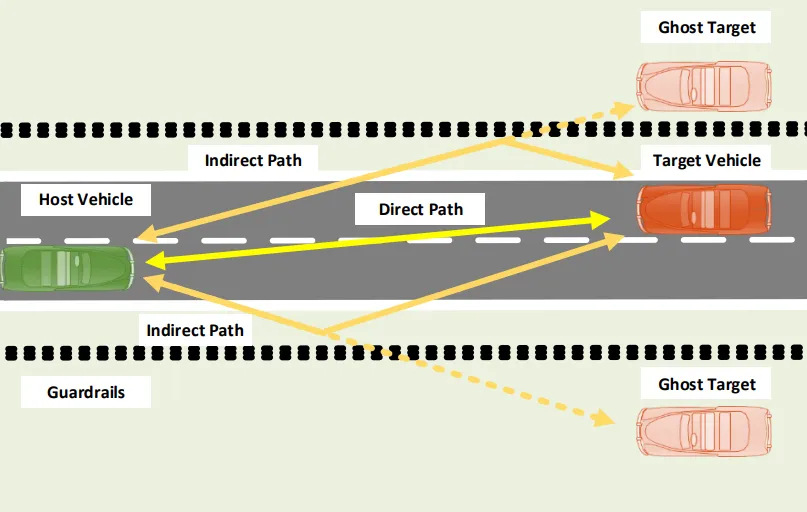
图1 具有反射表面(护栏和路面)的汽车环境的范例,会引起多径现象
多径现象影响了雷达目标探测和定位性能。在探测器处,当目标回波和多径信号被同时接收时,对它们进行联合处理。由此产生的信噪比(SNR)变化,进而影响目标探测范围和探测概率(PD)。此外,当直接路径上的目标信号和间接路径上的多径信号中从不同方向接收,但在同一距离--多普勒--方向分辨率单元内,由它们组合估计的目标到达方向(DOA)也会受到影响。
当目标回波和多径信号占用不同的距离-多普勒-方向分辨率单元时,它们分别被处理,因此可能导致两次单独的探测。由于多径信号代表一个不存在的目标,它会对虚警概率(PFA)产生不利影响。多径干扰对PFA的影响随着雷达分辨率的增加而增加,因此在高分辨率成像汽车雷达[1]中非常显著。
文献[5]-[9]研究了多种雷达多径抑制方法。对于汽车雷达,最近在[10]-[12]中提出了考虑汽车环境特征和汽车雷达特性的多径抑制方法。所考虑的场景特征是密集的环境、扩展的物体(多次探测)和周围的反射表面;所考虑的汽车成像雷达具有高分辨率和宽视场的特性。
这项工作考虑了在密集的城市环境中运行的汽车雷达受到多径现象的影响,并提出了一种新的方法来分类虚假(幽灵)目标。该方法的主要思想是评估多径效应引起的虚假目标和真实目标之间的相关性。假目标是真实目标的镜像版本,因此它们之间的关联允许分类。通过使用多个相关准则来评估这种对应关系,这些准则评估反射表面与接收信号有关的物理特征。这个过程涉及对反射面的估计,这有多种额外的好处。例如,它可以用来重建车辆的周围环境,并以此来识别盲区,或定位护栏和道路边缘(车辆自我定位所需)。通过模拟和使用77GHz汽车雷达接收的雷达回波,对所提方法的性能进行了评估。在两个典型的汽车场景中,目标车辆沿着平坦的反射面移动,受到多径效应的影响,证明了该算法识别幽灵目标的能力。
本文的其余部分组织如下。第Ⅱ节构建了多径信号模型,第Ⅲ节详细介绍了本文提出的多径抑制方法,第Ⅳ节评估了所提方法的性能,第Ⅴ节总结了我们的结论。
这项工作解决了在密集城市环境中工作的高分辨率线性调频连续波(LFMCW)汽车雷达的多径效应问题。然而,所提出的方法并不局限LFMCW雷达。
所考虑的LFM-CW雷达发射以下chirp信号:

其中为信号幅值,为载频,为chirp持续时间,为chirp斜率。发射的信号在自由空间传播,遇到目标,然后被反射回雷达。图2显示了多路径场景,其中接收信号由直接路径和间接路径接收的雷达回波组成:

其中直接路径回波,和间接回波是:

其中和是时间延迟,和分别是直接信号和间接信号的衰减振幅。

其中,。
通常,雷达通过多天线发射多个chirp来创建接收到的距离-多普勒-DOA数据立方体。在此数据立方体上执行3D FFT会得到一个范围分辨率为,多普勒分辨率为以及DOA分辨率为的单元格,其中是光速,是chirp带宽。这项工作考虑了高分辨率汽车雷达在多径和直接信号在距离、多普勒或DOA域上都是不同的,因此是独立处理的场景。
所提出的多径抑制方法依赖于观察到虚假目标的轨迹是真实目标轨迹相对于反射面的镜像版本。该方法的主要思想是估计所有候选多径目标对之间的反射面,计算相关准则,并根据其与真实航迹的相关性对多径航迹进行分类。
考虑图2中的场景,其中和是球坐标[13]中真实目标轨迹和虚假目标轨迹候选对的点。距离、多普勒和DOA可以从距离-多普勒-DOA数据立方体中估计,真实目标距离,虚假目标距离可以从式(5)中得到。多普勒和DOA也可以用类似的方式得到。
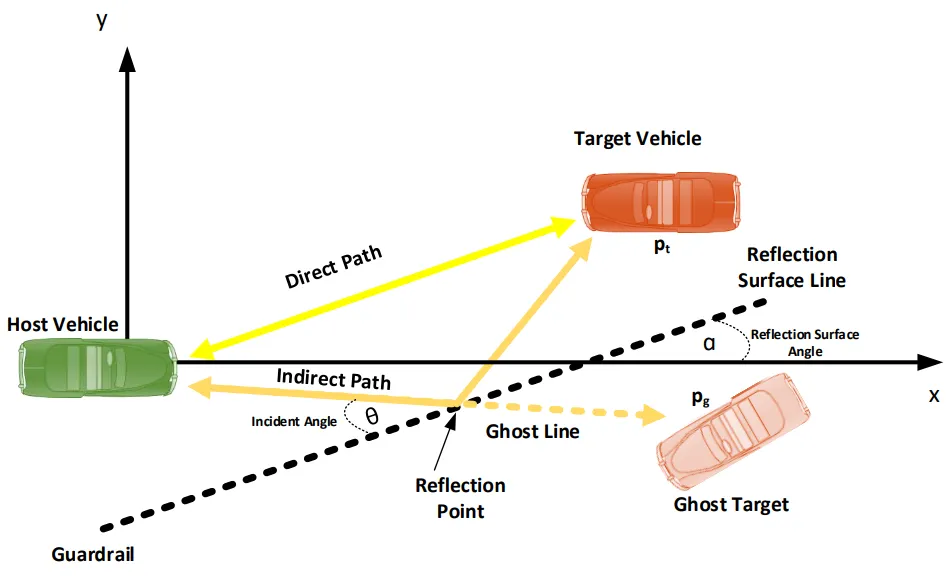
图2 多径效应几何原理
然后计算反射面线,如式(6)所示:

其中是反射面角,由下式得到:

反射面斜率为:

当以及,为:

同理,计算主车与虚假目标之间的虚假目标线,为:

其中为虚假目标角:

最后,计算反射线与虚线的交点为:

对所有跟踪点执行此过程将产生计算出来的反射线点,。假设这条线代表反射面,用一阶线性回归估计其参数,得到。反射线点与拟合直线点之间的误差用来表示反射面线性度。
这项工作提出了以下三个准则来决定候选配对。第一个准则是误差的平均平方距离(MSD)。

第二个准则是阈值的百分位误差:

第三个准则是反射面角与线性拟合面角度的预期误差:

其中是所有更新角度的集合,是所有估计反射面角度的集合。
假设汽车环境中的实际反射面是线性的(护栏、墙壁、标志、容器等),MSD和PER准则表示估计反射面线性的程度。MSD和PER分别通过误差扩展和绝对误差来评估估计反射面与其线性拟合线之间的不匹配。ANG准则评估估计的面角与拟合的直线角之间的不匹配。对于所有条件,值越小表示候选对之间的相关性越高。
图3为虚假目标轨迹分类MSD、PER和ANG准则的雷达处理流程示意图。首先,根据目标范围对轨道进行排序,因为具有直接路径的真实目标具有最短的范围。
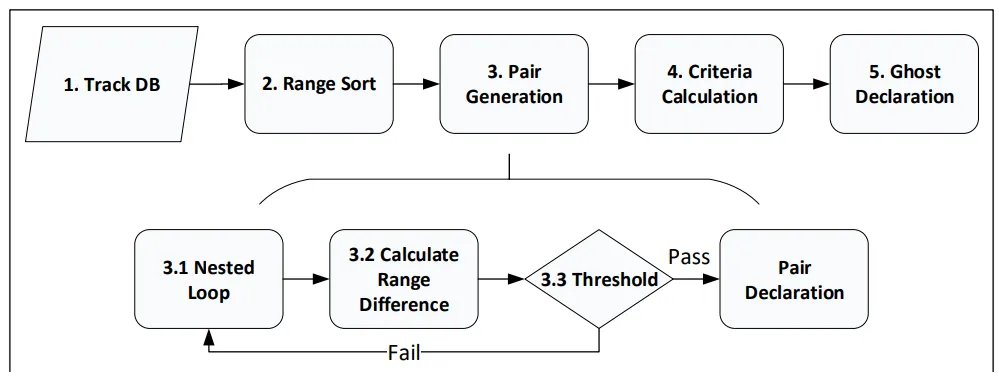
图3 虚假目标轨迹分类流程图
接下来,根据目标范围的差异准则,将轨迹配对成候选对。由于真实目标和虚假目标对不可能有明显不同的范围,只有那些范围差低于某个选定值的目标对才被考虑。图4显示了在雷达和目标都位于距直线反射表面(如护栏)4米的情况下,直接和间接路径之间的范围和角度差异。请注意,路径之间的差异很小,并随着目标范围的增加而减少。
为每个候选对评估相关准则。分数低于定义阈值的候选对被声明为真。对于每一对距离较远的轨道都被归类为虚假目标。
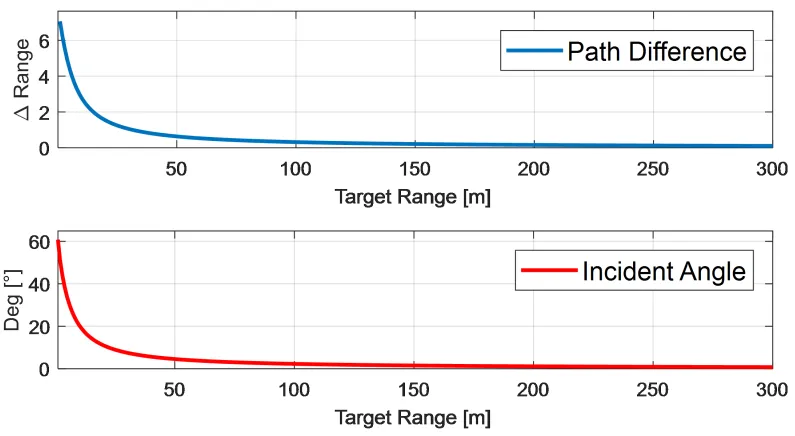
图4 直接传播路径和间接传播路径之间的距离和角度差异是目标距离的函数
本节通过模拟和使用77GHz汽车成像MIMO雷达[14]收集的原始数据测量,评估了所提方法的多径虚假目标抑制性能。考虑了两种有多径和无多径的汽车场景,以评估所提出的方法识别真实和幽灵目标的能力。测试I和III考虑了一个单一目标车辆沿金属表面移动的汽车场景,并分别通过模拟和使用收集的雷达测量数据来评估该算法是否能正确识别虚假目标轨迹。测试二和四考虑了一个汽车场景,即两辆目标车在没有相邻反射面的开放道路上的相邻车道上移动,并通过模拟和使用收集到的雷达测量数据分别评估该算法是否成功地对两个真实目标进行分类。
所有场景都考虑一个静止的主车,在起始位置(0,0)m处有一个测试雷达。图5显示了测试I结果,其中目标车辆被模拟在一个直护栏附近,该护栏诱导了一个虚假目标轨道和真实目标轨道。雷达在30m范围内探测到目标车辆以20m/s的速度向主车方向移动。
图6为测试II的结果,模拟相邻车道的两辆目标车辆在没有反射面的情况下行驶。假设车道宽度为2m,两个目标分别在30m和40m范围内进行模拟,分别以20m/s和10m/s的速度在各自的车道上向主机车辆移动。图7显示了测试III中真实目标和虚假目标的跟踪检测情况,其中雷达回波采集自沿金属表面移动的单个目标车辆。图9是测试III场景的照片。图8显示了测试IV中雷达回波采集的两辆真实目标车辆在开放道路上的车道内行驶的跟踪检测结果。图10是试验IV场景的照片。
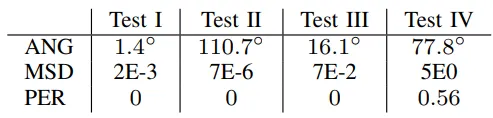
分别用(13)、(14)和(15)评价四项试验的MSD、PER和ANG相关准则。首先,利用轨迹位置计算(12)中的反射点。然后对反射点进行线性拟合,得到图5-8所示的估计反射面。表1总结了四项试验的评价准则。
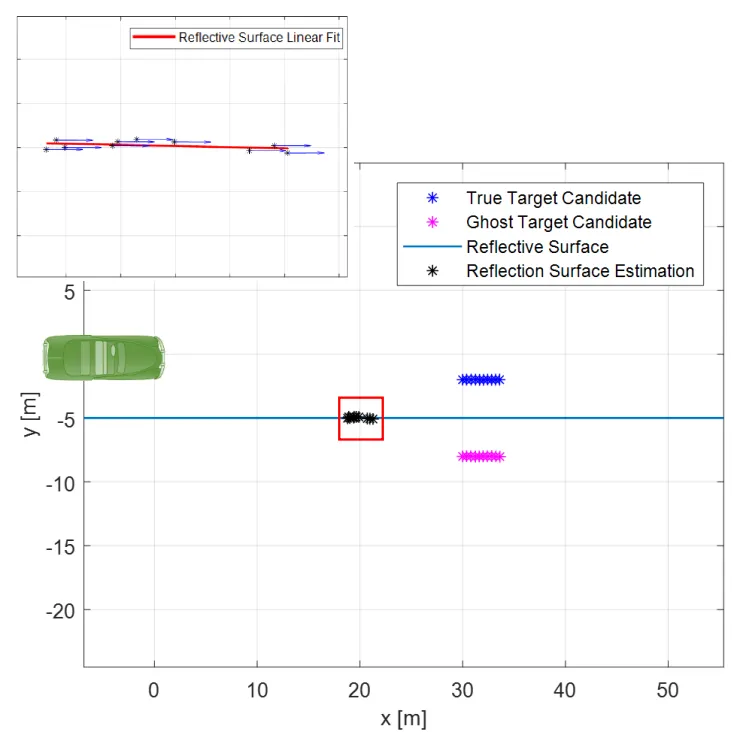
图5 测试I中雷达探测的俯视图,放大图显示了带有线性拟合反射面的红色矩形的内容
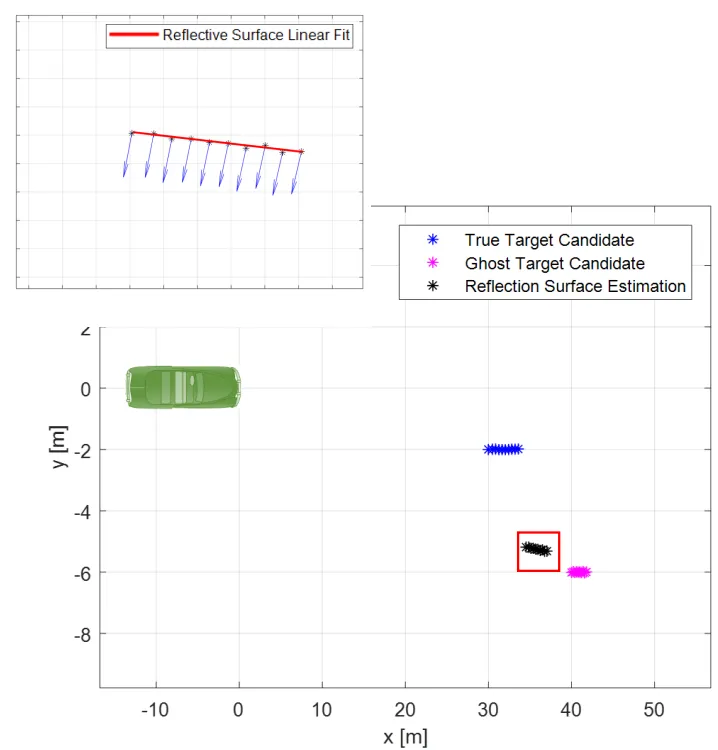
图6 测试II中雷达探测的俯视图,放大图显示了带有线性拟合反射面的红色矩形的内
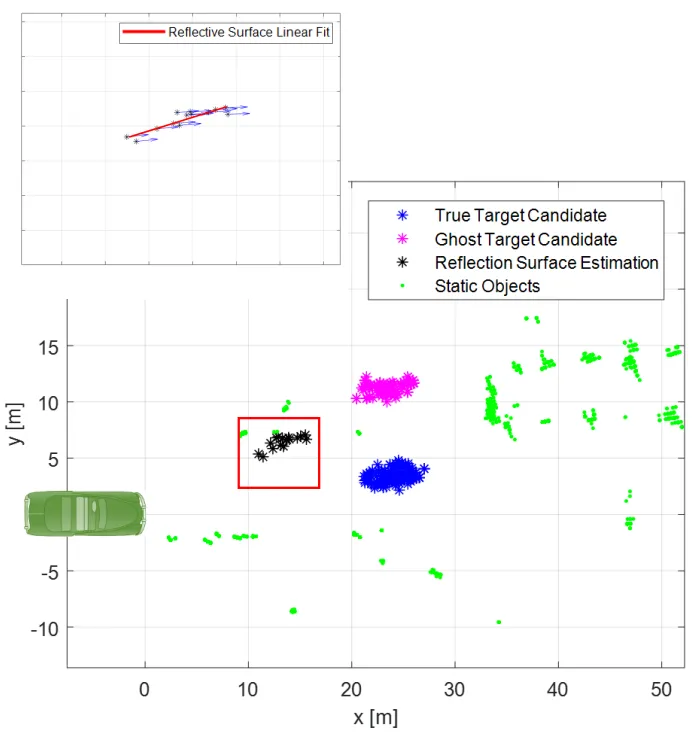
图7 测试III中雷达探测的俯视图,放大图显示了带有线性拟合反射面的红色矩形的内容
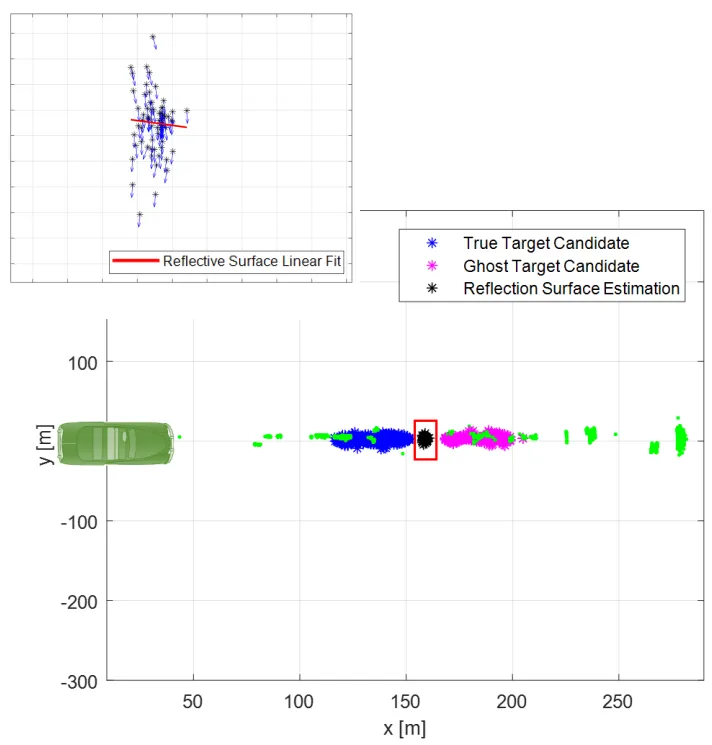
图8 测试IV中雷达探测的俯视图,放大图显示了带有线性拟合反射面的红色矩形的内容

图9 金属反射表面和目标车辆的测试场景III的环境,这是一个说明性的图像,拍摄后的记录(显示不同的车辆),来源:谷歌街景

图10 测试场景IV:没有反射面的开阔道路的环境,这是录制后拍摄的说明性图像,来源:谷歌街景
在表1中,请注意在测试I和测试III中获得了候选对的高相关性。这意味着所考虑的准则允许在这些测试中识别多路径现象,从而识别虚假目标轨迹。在测试II中,MSD和PER准则不具有指示性,这可以解释为两个目标车辆以匀速直线运动,因此创建了两条被解释为相关的轨道。在这个测试中,ANG准则是指示性的,并显示了两个真实目标之间的误关联性。在测试IV中,所有的准则都表明两个轨道之间的相关性很低,这意味着所提出的方法成功地将两个轨道分类为真正的目标。所有试验都表明,本文提出的多径抑制方法与MSD、PER和ANG准则可以成功识别多路径场景并对虚假目标轨迹进行分类。
表1 评估的相关准则
这项工作提出了一种多径虚假目标抑制方法,并演示了其在密集城市环境下运行的汽车雷达中的应用。该方法利用了被跟踪目标与其镜像虚假目标轨迹之间的相关性,考虑了三个准则来评估候选航迹对之间的相关性,以进行虚假目标轨迹分类。通过模拟和使用收集的车载雷达测量数据,评估了所提出方法的性能。在两种汽车测试场景中评估了所提出的方法对虚假目标进行分类的能力,一种是有反射表面,一种是没有多径虚假目标。在几个模拟和收集的雷达测量实例中,该方法成功地对存在多=多径虚假目标和不存在多径效应的真实目标进行了分类。
《Multipath Ghost Targets Mitigation in Automotive Environments》
Longman, Oren, Shahar Villeval, and Igal Bilik. "Multipath ghost targets mitigation in automotive environments." 2021 IEEE Radar Conference (RadarConf21). IEEE, 2021.
Oren Longman, Shahar Villeval, Igal Bilik
参考文献